ESPCI web site
ESPCI web site

Ramiro Godoy-Diana
blog.espci.fr/ramiro/
![]()
Research opportunities
Contact us if you are looking for an undergraduate or MSc internship as well as for PhD or postdoctoral projects.
Welcome to the Biomimetics and Fluid-Structure Interaction (aka BIOMIM) group at PMMH, ESPCI Paris. Our team has been working for a few years in the physics of bio-inspired fluid–structure interactions, mainly focusing on problems of locomotion at intermediate Reynolds numbers, such as flapping flight and undulatory swimming, and in wind and wave energy conversion. A large part of our recent research effort has been devoted to problems at the interface of physics and biology: from the role of hydrodynamics in the evolution of individual organisms (snakes, fish and insects), to the complex dynamics that constitute the physical basis of collective behaviors.
Current members | Alumni | Visitors and collaborators
Publications | PhD dissertations | Funding
Current members of the group:
PhD students and Postdocs
 Alexandre Dallot, PhD 2025-2028 Insect-inspired flapping wings |
 Sam Gaborieau, PhD 2025-2028 Phase transitions in collective fish swimming |
 Diane Komaroff, PhD 2023-2026 Interaction of surface waves with an array of moving obstacles: applications to wave energy conversion |
 Qimin Ma (马祺敏), PhD 2023-2027 Modelling collective fish swimming with visual perturbations |
 Peng Yu (余鹏), PhD 2023-2027 Aerodynamic and Elastic Response of Dragonfly-inspired Flapping Wings |
Interns and visiting students
Victor Dupic-Miquel, Parcours Recherche Centrale Supelec, 2023-2025
Christophe Dai, CPES PSL 2A, 2026
Dylan Grudé, CPES PSL 2A, 2026
Mohamed Yassir Laalej, ENSEM Casablanca, Visiting PhD student 2026
Weng Loi (Meagan) Iu, M1 Mechanics Institut Polytechnique de Paris, 2026
Visitors
Manuel Lorite-Díez, visiting faculty from Universidad de Granada

Team photo onApril 15, 2026

Team photo on June 29, 2023

Team photo on July 1st, 2021
Publications
PhD dissertations here
Preprints
Turning without Fins: How Snakes Achieve High Maneuverability While Swimming
E. Gregorio, R. Godoy-Diana, A. Herrel
(Submitted)
preprint: https://hal.science/hal-04876557
Aerodynamic consequences of wing damage in dragonflies
P. Yu, R. Godoy-Diana, B. Thiria, D. Kolomenskiy, T. Engels
(Submitted)
preprint:arXiv:2507.00713
Journal articles
 Propulsive performance of a windsurf-inspired pitching foil*
Propulsive performance of a windsurf-inspired pitching foil*
G. Bertrand, T. Aurégan, B. Thiria, R. Godoy-Diana, M. Fermigier
Physical Review Fluids 10, 074401 (2025)
doi: 10.1103/PhysRevFluids.10.074401
preprint: https://arxiv.org/abs/arXiv:2412.12878
*Editor’s suggestion
D-shaped body wake control through flexible filaments
J. C. Muñoz-Hervás, B. Semin, M. Lorite-Díez, G. J. Michon, Juan D’Adamo, J.I. Jiménez-González, R. Godoy-Diana
Physical Review Fluids 10, 063903 (2025)
doi: 10.1103/8jd7-j82q
preprint: https://arxiv.org/abs/arXiv:2411.08556
Experiments on water wave interactions with a horizontal submerged elastic plate
G. Polly, A. Mérigaud, B. Thiria, R. Godoy-Diana
Journal of Fluid Mechanics 1007, R4 (2025)
doi: 10.1017/jfm.2025.90
Improving propulsive efficiency using bio-inspired intermittent locomotion
T. Aurégan, M. Lemoine, B. Thiria, S. Courrech du Pont
J. R. Soc. Interface 22: 20240624 (2025)
doi: 10.1098/rsif.2024.0624
Can All Snakes Swim? A review of the evidence and testing species across phylogeny and morphological diversity
G. Fosseries, A. Herrel, R. Godoy-Diana, P. Gaucher, M. Traimond, A. Joris, K. Daoues, A. Gouygou, O. Chateau, H. Gossuin, P. Banzept, C. Banzept, D. Lefebvre, & X. Bonnet
Zoology 126223 (2024).
doi: https://doi.org/10.1016/j.zool.2024.126223
Subtle frequency matching reveals resonant phenomenon in the flight of Odonata
C. Aracheloff, R. Garrouste, A. Nel, R. Godoy-Diana, B. Thiria
Journal of the Royal Society Interface 21, 20240401 (2024).
doi: https://doi.org/10.1098/rsif.2024.0401
Confinement-driven state transition and bistability in schooling fish
B. Lafoux, P. Bernard, B. Thiria, R. Godoy-Diana
Physical Review E, 110(3), 034613 (2024).
doi: https://doi.org/10.1103/PhysRevE.110.034613
arXiv preprint: https://arxiv.org/abs/2401.01850
Shape reconfiguration for underwater propeller efficiency improvement
T. Aurégan, S. Courrech du Pont, B. Thiria
Physical Review Fluids, 9, 074402 (2024).
doi: https://doi.org/10.1103/PhysRevFluids.9.074402
Form and function of anguilliform swimming: a review
V. Stin, R. Godoy-Diana, X. Bonnet, & A. Herrel
Biological Reviews, 99, 2190–2210 (2024)
doi: https://doi.org/10.1111/brv.13116
Modelling the far-field effect of drag-induced dissipation in wave-structure interaction: A numerical and experimental study
A. Mérigaud, B. Thiria, R. Godoy-Diana, G. Perret
Journal of Fluid Mechanics, 987, A24 (2024).
doi: https://doi.org/10.1017/jfm.2024.298
Lift-up and streak waviness drive the self-sustained process in wall-bounded transition to turbulence
T. Liu, B. Semin, R. Godoy-Diana, J. E. Wesfreid
Physical Review Fluids, 9, 033901 (2024).
doi: https://doi.org/10.1103/PhysRevFluids.9.033901
arXiv preprint: https://arxiv.org/abs/2308.16792
Thrust force is tuned by the rigidity distribution in insect-inspired flapping wings
R. Antier, B. Thiria, & R. Godoy-Diana
Journal of Fluids and Structures, 124, 104043 (2024).
doi: https://doi.org/10.1016/j.jfluidstructs.2023.104043
arXiv preprint: https://arxiv.org/abs/2306.01612
Far-field hydrodynamic interaction in a group of swimmers
G. Li, L. Duan, J. Sesterhenn, R. Godoy-Diana, B. Thiria, & D. Kolomenskiy
Journal of Fluid Mechanics, 974, A34 (2023).
doi: https://doi.org/10.1017/jfm.2023.802
Measuring the 3D wake of swimming snakes (Natrix tessellata) using volumetric velocimetry
V. Stin, R. Godoy-Diana, X. Bonnet, & A. Herrel
Journal of Experimental Biology, 226, jeb245929 (2023).
doi: https://doi.org/10.1242/jeb.245929
Scaling the thrust and deformations of a rotor with flexible blades
T. Aurégan, B. Thiria, S. Courrech du Pont
Physical Review Fluids, 8, 044401 (2023).
doi: https://doi.org/10.1103/PhysRevFluids.8.044401
Illuminance-tuned collective motion in fish
B. Lafoux, J. Moscatelli, R. Godoy-Diana & B. Thiria
Communications Biology 6, Article number: 585 (2023).
doi: https://doi.org/10.1038/s42003-023-04861-8
Geometrical framework for hydrodynamics and control of wave energy converters
A. Mérigaud, B. Thiria, & R. Godoy-Diana
PRX Energy 2, 023003 (2023).
doi: https://doi.org/10.1103/PRXEnergy.2.023003
Special issue: bioinspired fluid-structure interaction
S. Jung & R. Godoy-Diana
Bioinspiration & biomimetics 18, 030401 (2023)
doi: https://doi.org/10.1088/1748-3190/acc778
Intermittent vs. continuous swimming: An optimization tale
G. Li, D. Kolomenskiy, H. Liu, R. Godoy-Diana & B. Thiria
Physical Review Fluids 8, 013101 (2023)
doi: https://doi.org/10.1103/PhysRevFluids.8.013101
see also in Physics Magazine: Why Fish Swim Intermittently
Divergence of climbing escape flight performance in Morpho butterflies living in different microhabitats
C. Le Roy, N. J. Silva, R. Godoy-Diana, V. Debat, V. Llaurens, and F. T. Muijres
Journal of Experimental Biology 225 (15), jeb243867 (2022)
doi: https://doi.org/10.1242/jeb.243867
Wake and aeroelasticity of a flexible pitching foil

The wake of a flapping foil is the basic model representing the propulsive mechanism of swimming and flying animals that use wings, fins, and body oscillations to drive their locomotion. The reverse Bénard-von Kármán vortex street is one of the landmark features of such wakes, since it is associated to the onset of thrust generation. The vortex shedding frequency is clocked by the flapping motion but, in a realistic model the force production dynamics is intimately linked to the elastic response of the flapping structure and the resonance between the different frequencies involved has been invoked in the literature to explain efficient flapping regimes. Here we show, using a wind tunnel experiment and hydrodynamic stability analysis, that thrust peaks occur when the wake resonant frequency is tuned with the foil elastic dynamics.
Hydrodynamical Fingerprint of a Neighbour in a Fish Lateral Line

For fish, swimming in group may be favorable to individuals. Several works reported that in a fish school, individuals sense and adjust their relative position to prevent collisions and maintain the group formation. Also, from a hydrodynamic perspective, relative-position and kinematic synchronisation between adjacent fish may considerably influence their swimming performance. Fish may sense the relative-position and tail-beat phase difference with their neighbors using both vision and the lateral-line system, however, when swimming in dark or turbid environments, visual information may become unavailable. To understand how lateral-line sensing can enable fish to judge the relative-position and phase-difference with their neighbors, in this study, based on a verified three-dimensional computational fluid dynamics approach, we simulated two fish swimming adjacently with various configurations. The lateral-line signal was obtained by sampling the surface hydrodynamic stress. The sensed signal was processed by Fast Fourier Transform (FFT), which is robust to turbulence and environmental flow. By examining the lateral-line pressure and shear-stress signals in the frequency domain, various states of the neighboring fish were parametrically identified. Our results reveal that the FFT-processed lateral-line signals in one fish may potentially reflect the relative-position, phase-differences, and the tail-beat frequency of its neighbor. Our results shed light on the fluid dynamical aspects of the lateral-line sensing mechanism used by fish. Furthermore, the presented approach based on FFT is especially suitable for applications in bioinspired swimming robotics. We provide suggestions for the design of artificial systems consisting of multiple stress sensors for robotic fish to improve their performance in collective operation.
A wide-spacing approximation model for the reflection and transmission of water waves over an array of vertical obstacles.

With a view to numerical modelling and optimisation of wave energy farms, a simple recursive formulation is employed to solve for the reflection and transmission of plane water waves by a number of rows of vertical obstacles, under the wide-spacing approximation. The proposed recursive formulation relies on the ’concatenation’ of any two sets of obstacles, for which the reflection–transmission problem is already resolved. Furthermore, the obstacles are allowed to move in any combination of pitch and surge. The proposed recursive model is validated by means of physical experiments in a small-scale wave flume, whereby waves are reflected and transmitted by one, two and three rows of vertical, flexible blades, taking into account dissipation within the fluid along the wave propagation direction. For the special case of identical, regularly spaced rows, under the adopted formalism, distinct theoretical behaviours are highlighted, depending on whether or not individual obstacles absorb (or dissipate) energy as they interact with incoming waves. In a ’non–dissipative’ case, the well known fact that discrete values of the row-to-row distance L completely cancel reflection is retrieved, as well as the existence of ’band-gap’ intervals, i.e. intervals for L where reflection is high, with maximum reflection occurring away from the Bragg condition. In contrast, when the obstacles dissipate or absorb energy as they interact with the fluid, reflection is always non-zero, and, as the number of rows tends to infinity, forms marked Bragg peaks, reaching unity when L is a multiple of half a wavelength.
Yves Couder. De l’apprentissage par l’expérience, et quand l’expérience guide la recherche

Cet article revient sur un enseignement central du département de physique de l’Université de Paris. Initié par Yves Couder et ses collègues au milieu des années 1970, cet enseignement a pour but de mettre l’observation, le questionnement et la mesure expérimentale au centre de l’apprentissage des sciences fondamentales, tranchant radicalement avec les méthodes conventionnelles. De nos jours, le module de « Physique Expérimentale » fait toujours partie intégrante de la formation des jeunes physiciens de l’Université de Paris et a depuis inspiré plusieurs autres enseignements universitaires et de grandes écoles.
B. Thiria, & S. Courrech du Pont, Reflets de la Physique 68, (2021)
doi:10.1051/refdp/202168028
Burst-and-coast swimmers optimize gait by adapting unique intrinsic cycle

Body and caudal fin undulations are a widespread locomotion strategy in fish, and their swimming kinematics is usually described by a characteristic frequency and amplitude of the tail-beat oscillation. In some cases, fish use intermittent gaits, where a single frequency is not enough to fully describe their kinematics. Energy efficiency arguments have been invoked in the literature to explain this so-called burst-and-coast regime but well controlled experimental data are scarce. Here we report on an experiment with burst-and-coast swimmers and a numerical model based on the observations to show that : (1) fish modulate a unique intrinsic cycle to sustain the demanded speed by modifying the bursting to coasting ratio while maintaining the duration of the cycle nearly constant ; and (2) the chosen kinematics correspond to energy-saving gaits over the range of swimming speeds tested.
See also :
Material optimization of flexible blades for wind turbines

Bioinspired flexible blades have been recently shown to significantly improve the versatility of horizontal-axis wind turbines, by widening their working range and increasing their efficiency. The aerodynamic and centrifugal forces bend the blade along its chord, varying the pitch angle by means of non consuming mechanisms. Here we introduce a general method based on a universal scaling, which finds the optimal soft materials for the blades to maximize the overall turbine efficiency or rotational power, for any required geometry of classical horizontal-axis turbines. The optimization problem, which depends on various parameters, such as the wind velocity, the rotation rate, the density, the rigidity and the geometry of the blade, is reduced to only two dimensionless parameters: the Cauchy number and the centrifugal number. The blade-element momentum theory is coupled to a torsion spring-based model for the blade deformation. Taking into account realistic incoming wind velocity distributions in the North Sea and a large wind-turbine geometry, we found a significant increase of the total harvested power, up to þ 35%. In addition, the optimal soft material corresponding to the maximal efficiency over the entire working range for a given wind turbine geometry is, within the limits of small blade deformations, scale independent. Thus experiments on small wind turbines are a possible way to determine the optimal soft materials for larger ones. These flexible blades are found to be between 5% and 20% lighter than the current rigid blades.
V. Cognet, S. Courrech du Pont & B. Thiria
Renew. Energy 160, 1373-1384 (2020)
Cognet et al.
Exploring the functional meaning of head shape disparity in aquatic snakes
 Phenotypic diversity, or disparity, can be explained by simple genetic drift or, if functional constraints are strong, by selection for ecologically relevant phenotypes. We here studied phenotypic disparity in head shape in aquatic snakes. We investigated whether conflicting selective pressures related to different functions have driven shape diversity and explore whether similar phenotypes may give rise to the same functional output (i.e., many‐to‐one mapping of form to function). We focused on the head shape of aquatically foraging snakes as they fulfill several fitness‐relevant functions and show a large amount of morphological variability. We used 3D surface scanning and 3D geometric morphometrics to compare the head shape of 62 species in a phylogenetic context. We first tested whether diet specialization and size are drivers of head shape diversification. Next, we tested for many‐to‐one mapping by comparing the hydrodynamic efficiency of head shape characteristic of the main axes of variation in the dataset. We 3D printed these shapes and measured the forces at play during a frontal strike. Our results show that diet and size explain only a small amount of shape variation. Shapes did not fully functionally converge as more specialized aquatic species evolved a more efficient head shape than others. The shape disparity observed could thus reflect a process of niche specialization.
Phenotypic diversity, or disparity, can be explained by simple genetic drift or, if functional constraints are strong, by selection for ecologically relevant phenotypes. We here studied phenotypic disparity in head shape in aquatic snakes. We investigated whether conflicting selective pressures related to different functions have driven shape diversity and explore whether similar phenotypes may give rise to the same functional output (i.e., many‐to‐one mapping of form to function). We focused on the head shape of aquatically foraging snakes as they fulfill several fitness‐relevant functions and show a large amount of morphological variability. We used 3D surface scanning and 3D geometric morphometrics to compare the head shape of 62 species in a phylogenetic context. We first tested whether diet specialization and size are drivers of head shape diversification. Next, we tested for many‐to‐one mapping by comparing the hydrodynamic efficiency of head shape characteristic of the main axes of variation in the dataset. We 3D printed these shapes and measured the forces at play during a frontal strike. Our results show that diet and size explain only a small amount of shape variation. Shapes did not fully functionally converge as more specialized aquatic species evolved a more efficient head shape than others. The shape disparity observed could thus reflect a process of niche specialization.
M. Segall, R. Cornette, R. Godoy-Diana & A. Herrel
Ecology and Evolution 10(14), 6993-7005 (2020)
doi:10.1002/ece3.6380
On the Fluid Dynamical Effects of Synchronization in Side-by-Side Swimmers
 We examined experimentally the in-phase and anti-phase synchronized swimming of two self-propelled independent flexible foils swimming side-by-side in a water tank. The foils are actuated by pitching oscillations at one extremity—the head of the swimmers—and the flow engendered by their undulations is analyzed using two-dimensional particle image velocimetry in their frontal symmetry plane. Following recent observations on the behavior of real fish, we focus on the comparison between in-phase and anti-phase actuation by fixing all other geometric and kinematic parameters. We show that swimming with a neighbor is beneficial for both synchronizations tested, as compared to swimming alone, with an advantage for the anti-phase synchronization. We show that the advantage of anti-phase synchronization in terms of swimming performance for the two-foil “school” results from the emergence of a periodic coherent jet between the two swimmers.
We examined experimentally the in-phase and anti-phase synchronized swimming of two self-propelled independent flexible foils swimming side-by-side in a water tank. The foils are actuated by pitching oscillations at one extremity—the head of the swimmers—and the flow engendered by their undulations is analyzed using two-dimensional particle image velocimetry in their frontal symmetry plane. Following recent observations on the behavior of real fish, we focus on the comparison between in-phase and anti-phase actuation by fixing all other geometric and kinematic parameters. We show that swimming with a neighbor is beneficial for both synchronizations tested, as compared to swimming alone, with an advantage for the anti-phase synchronization. We show that the advantage of anti-phase synchronization in terms of swimming performance for the two-foil “school” results from the emergence of a periodic coherent jet between the two swimmers.
 The physical basis for fish schooling is examined using three-dimensional numerical simulations of a pair of swimming fish, with kinematics and geometry obtained from experimental data. Energy expenditure and efficiency are evaluated using a cost of transport function, while the effect of schooling on the stability of each swimmer is examined by probing the lateral force and the lateral and longitudinal force fluctuations. We construct full maps of the aforementioned quantities as functions of the spatial pattern of the swimming fish pair and show that both energy expenditure and stability can be invoked as possible reasons for the swimming patterns and tail-beat synchronization observed in real fish. Our results suggest that high cost of transport zones should be avoided by the fish. Wake capture may be energetically unfavorable in the absence of kinematic adjustment. We hereby hypothesize that fish may restrain from wake capturing and, instead, adopt side-to-side configuration as a conservative strategy, when the conditions of wake energy harvesting are not satisfied. To maintain a stable school configuration, compromise between propulsive efficiency and stability, as well as between school members, ought to be considered.
The physical basis for fish schooling is examined using three-dimensional numerical simulations of a pair of swimming fish, with kinematics and geometry obtained from experimental data. Energy expenditure and efficiency are evaluated using a cost of transport function, while the effect of schooling on the stability of each swimmer is examined by probing the lateral force and the lateral and longitudinal force fluctuations. We construct full maps of the aforementioned quantities as functions of the spatial pattern of the swimming fish pair and show that both energy expenditure and stability can be invoked as possible reasons for the swimming patterns and tail-beat synchronization observed in real fish. Our results suggest that high cost of transport zones should be avoided by the fish. Wake capture may be energetically unfavorable in the absence of kinematic adjustment. We hereby hypothesize that fish may restrain from wake capturing and, instead, adopt side-to-side configuration as a conservative strategy, when the conditions of wake energy harvesting are not satisfied. To maintain a stable school configuration, compromise between propulsive efficiency and stability, as well as between school members, ought to be considered.
 Considerable work has been undertaken for the improvement of wave-energy converters and array design. It has recently been suggested that by extracting wave energy, these farms could also serve to protect shorelines from wave damage. The present work focuses on the local effects of wave-structure interactions within an array of oscillating absorbers to optimize global effects, such as reflection, damping, and energy absorption. We use a model system of flexible blades, subjected to monochromatic waves, and develop a simplified one-dimensional model to predict optimal configurations, depending on various parameters, which include the number of blades, their spacing, and their flexibility. Optimal configurations are found to be close to regular patterns, and the impact of array configurations is shown to be limited regarding wave dissipation, mainly due to a competition between reflection and absorption.
Considerable work has been undertaken for the improvement of wave-energy converters and array design. It has recently been suggested that by extracting wave energy, these farms could also serve to protect shorelines from wave damage. The present work focuses on the local effects of wave-structure interactions within an array of oscillating absorbers to optimize global effects, such as reflection, damping, and energy absorption. We use a model system of flexible blades, subjected to monochromatic waves, and develop a simplified one-dimensional model to predict optimal configurations, depending on various parameters, which include the number of blades, their spacing, and their flexibility. Optimal configurations are found to be close to regular patterns, and the impact of array configurations is shown to be limited regarding wave dissipation, mainly due to a competition between reflection and absorption.
 Transient locomotion under water is highly constrained by drag and added mass, yet some aquatic snakes catch their prey using a fast forward acceleration, with the mouth opened. These aquatic snakes show a convergence of their head shape in comparison with closely related species that do not forage under water. As both drag and added mass are related to some extent to the shape of the moving object, we explored how shape impacts the hydrodynamic forces applied to the head of a snake during a prey capture event. We compared two 3D-printed heads representing typical shapes of aquatically-foraging and non-aquatically-foraging snakes, and frontal strike kinematics based on in vivo observations. By using direct force measurements, we calculated the drag and added mass coefficient of the two models. Our results show that both drag and added mass are reduced in aquatic snakes. The drag coefficient of the aquatic model is 0.24, which is almost two times smaller than the non-aquatic model. The added mass coefficient of the aquatic model is 0.15 versus 0.24 for the non-aquatic model, showing that the convergence of head shape in aquatically foraging snakes is associated with a hydrodynamic advantage during frontal striking. The vorticity field measurements with particle image velocimetry show that a less intense recirculation bubble behind the jaw of the aquatic model, compared to the non-aquatic model, might be the basis of this advantage.
Transient locomotion under water is highly constrained by drag and added mass, yet some aquatic snakes catch their prey using a fast forward acceleration, with the mouth opened. These aquatic snakes show a convergence of their head shape in comparison with closely related species that do not forage under water. As both drag and added mass are related to some extent to the shape of the moving object, we explored how shape impacts the hydrodynamic forces applied to the head of a snake during a prey capture event. We compared two 3D-printed heads representing typical shapes of aquatically-foraging and non-aquatically-foraging snakes, and frontal strike kinematics based on in vivo observations. By using direct force measurements, we calculated the drag and added mass coefficient of the two models. Our results show that both drag and added mass are reduced in aquatic snakes. The drag coefficient of the aquatic model is 0.24, which is almost two times smaller than the non-aquatic model. The added mass coefficient of the aquatic model is 0.15 versus 0.24 for the non-aquatic model, showing that the convergence of head shape in aquatically foraging snakes is associated with a hydrodynamic advantage during frontal striking. The vorticity field measurements with particle image velocimetry show that a less intense recirculation bubble behind the jaw of the aquatic model, compared to the non-aquatic model, might be the basis of this advantage.
M. Segall, A. Herrel & R. Godoy-Diana Bioinspir. Biomim. 14 036005 (2019).
 In this paper, we present a short review on some of significative results on insect flapping flight. In particular, we focus on the time varying shape mechanisms observed during the flapping cycle that are used by insects to enhance the production of aerodynamic force. We then discuss a few examples on how these mechanisms are adapted to energy harvesters in engineered applications.
In this paper, we present a short review on some of significative results on insect flapping flight. In particular, we focus on the time varying shape mechanisms observed during the flapping cycle that are used by insects to enhance the production of aerodynamic force. We then discuss a few examples on how these mechanisms are adapted to energy harvesters in engineered applications.
B. Thiria Current Opinion in Insect Science 30, 39–45 (2018), doi.org/10.1016/j.cois.2018.09.001
 Flying insects impress by their versatility and have been a recurrent source of inspiration for engineering devices. A large body of literature has focused on various aspects of insect flight, with an essential part dedicated to the dynamics of flapping wings and their intrinsically unsteady aerodynamic mechanisms. Insect wings flex during flight and a better understanding of structural mechanics and aeroelasticity is emerging. Most recently, insights from solid and fluid mechanics have been integrated with physiological measurements from visual and mechanosensors in the context of flight control in steady airs and through turbulent conditions. We review the key recent advances concerning flight in unsteady environments and how the multi-body mechanics of the insect structure — wings and body — are at the core of the flight control question. The issues herein should be considered when applying bio-informed design principles to robotic flapping wings.
Flying insects impress by their versatility and have been a recurrent source of inspiration for engineering devices. A large body of literature has focused on various aspects of insect flight, with an essential part dedicated to the dynamics of flapping wings and their intrinsically unsteady aerodynamic mechanisms. Insect wings flex during flight and a better understanding of structural mechanics and aeroelasticity is emerging. Most recently, insights from solid and fluid mechanics have been integrated with physiological measurements from visual and mechanosensors in the context of flight control in steady airs and through turbulent conditions. We review the key recent advances concerning flight in unsteady environments and how the multi-body mechanics of the insect structure — wings and body — are at the core of the flight control question. The issues herein should be considered when applying bio-informed design principles to robotic flapping wings.
R. Bomphrey and R. Godoy-Diana Current Opinion in Insect Science 30, 26–32 (2018), doi:10.1016/j.cois.2018.08.003
 In this Rapid Communication, we study with the Stuart-Landau (SL) amplitude equation, a wake flow control scenario using experimental data from a cylinder wake forced by plasma actuators. Given the formal framework recently discussed by Gallaire et al. (Fluid Dyn. Res. 48, 061401, 2016) on pushing amplitude equations far from threshold, we analyze experimental data of a forced wake in order to test the SL reduced order model. Linear stability theory and global mode concepts are used to determine the SL parameters. The extension to forced wakes of the SL model had been proposed by Thira and Wesfreid (J. Fluid Mech. 579, 137, 2007) in the context of their study on stability properties, but its employment still remained an open question. Here, we show that a forced wake at a Reynolds number far from the first threshold can also attain the critical behavior described by the SL model.
In this Rapid Communication, we study with the Stuart-Landau (SL) amplitude equation, a wake flow control scenario using experimental data from a cylinder wake forced by plasma actuators. Given the formal framework recently discussed by Gallaire et al. (Fluid Dyn. Res. 48, 061401, 2016) on pushing amplitude equations far from threshold, we analyze experimental data of a forced wake in order to test the SL reduced order model. Linear stability theory and global mode concepts are used to determine the SL parameters. The extension to forced wakes of the SL model had been proposed by Thira and Wesfreid (J. Fluid Mech. 579, 137, 2007) in the context of their study on stability properties, but its employment still remained an open question. Here, we show that a forced wake at a Reynolds number far from the first threshold can also attain the critical behavior described by the SL model.
S. Boury, B. Thiria, R. Godoy-Diana, G. Artana, J. E. Wesfreid and J. D’Adamo;
Phys. Rev. Fluids., 3, 091901(R), (2018)
 Aquatic plants are known to protect coastlines and riverbeds from erosion by damping waves and fluid flow. These flexible structures absorb the fluid-borne energy of an incoming fluid by deforming mechanically. In this paper we focus on the mechanisms involved in these fluid-elasticity interactions, as an ef cient energy harvesting system, using an experimental canopy model in a wave tank. We study an array of partially-submerged flexible structures that are subjected to the action of a surface wave field, investigating in particular the role of spacing between the elements of the array on the ability of our system to absorb energy from the flow. The energy absorption potential of the canopy model is examined using global wave height measurements for the wave eld and local measurements of the elastic energy based on the kinematics of each element of the canopy. We study different canopy arrays and show in particular that exibility improves wave damping by around 40%, for which half is potentially harvestable.
Aquatic plants are known to protect coastlines and riverbeds from erosion by damping waves and fluid flow. These flexible structures absorb the fluid-borne energy of an incoming fluid by deforming mechanically. In this paper we focus on the mechanisms involved in these fluid-elasticity interactions, as an ef cient energy harvesting system, using an experimental canopy model in a wave tank. We study an array of partially-submerged flexible structures that are subjected to the action of a surface wave field, investigating in particular the role of spacing between the elements of the array on the ability of our system to absorb energy from the flow. The energy absorption potential of the canopy model is examined using global wave height measurements for the wave eld and local measurements of the elastic energy based on the kinematics of each element of the canopy. We study different canopy arrays and show in particular that exibility improves wave damping by around 40%, for which half is potentially harvestable.
C. Nové-Josserand, F. Castro Hebrero, L.-M. Petit, W. M. Megill, R. Godoy-Diana and B. Thiria;
Bioinspir. Biomim., 13, 036006, (2018)
 Questions of energy dissipation or friction appear immediately when addressing the problem of a body moving in a fluid. For the most simple problems, involving a constant steady propulsive force on the body, a straightforward relation can be established balancing this driving force with a skin friction or form drag, depending on the Reynolds number and body geometry. This elementary relation closes the full dynamical problem and sets, for instance, average cruising velocity or energy cost. In the case of finite-sized and time-deformable bodies though, such as flapping flyers or undulatory swimmers, the comprehension of driving/dissipation interactions is not straightforward. The intrinsic unsteadiness of the flapping and deforming animal bodies complicates the usual application of classical fluid dynamic forces balance. One of the complications is because the shape of the body is indeed changing in time, accelerating and decelerating perpetually, but also because the role of drag (more specifically the role of the local drag) has two different facets, contributing at the same time to global dissipation and to driving forces. This causes situations where a strong drag is not necessarily equivalent to inefficient systems. A lot of living systems are precisely using strong sources of drag to optimize their performance. In addition to revisiting classical results under the light of recent research on these questions, we discuss in this review the crucial role of drag from another point of view that concerns the fluid–structure interaction problem of animal locomotion. We consider, in particular, the dynamic subtleties brought by the quadratic drag that resists transverse motions of a flexible body or appendage performing complex kinematics, such as the phase dynamics of a flexible flapping wing, the propagative nature of the bending wave in undulatory swimmers, or the surprising relevance of drag-based resistive thrust in inertial swimmers.
Questions of energy dissipation or friction appear immediately when addressing the problem of a body moving in a fluid. For the most simple problems, involving a constant steady propulsive force on the body, a straightforward relation can be established balancing this driving force with a skin friction or form drag, depending on the Reynolds number and body geometry. This elementary relation closes the full dynamical problem and sets, for instance, average cruising velocity or energy cost. In the case of finite-sized and time-deformable bodies though, such as flapping flyers or undulatory swimmers, the comprehension of driving/dissipation interactions is not straightforward. The intrinsic unsteadiness of the flapping and deforming animal bodies complicates the usual application of classical fluid dynamic forces balance. One of the complications is because the shape of the body is indeed changing in time, accelerating and decelerating perpetually, but also because the role of drag (more specifically the role of the local drag) has two different facets, contributing at the same time to global dissipation and to driving forces. This causes situations where a strong drag is not necessarily equivalent to inefficient systems. A lot of living systems are precisely using strong sources of drag to optimize their performance. In addition to revisiting classical results under the light of recent research on these questions, we discuss in this review the crucial role of drag from another point of view that concerns the fluid–structure interaction problem of animal locomotion. We consider, in particular, the dynamic subtleties brought by the quadratic drag that resists transverse motions of a flexible body or appendage performing complex kinematics, such as the phase dynamics of a flexible flapping wing, the propagative nature of the bending wave in undulatory swimmers, or the surprising relevance of drag-based resistive thrust in inertial swimmers.
R. Godoy-Diana and B. Thiria;
Proc. R. Soc. Interface, 15, 20170715, (2018)
 We study the force production dynamics of undulating elastic plates as a model for fish-like inertial swimmers. Using a beam model coupled with Lighthill’s large-amplitude elongated-body theory, we explore different localised actuations at one extremity of the plate (heaving, pitching and a combination of both) in order to quantify the reactive and resistive contributions to the thrust. The latter has the form of a quadratic drag in large Reynolds number swimmers and has recently been pointed out as a crucial element in the thrust force balance. We validate the output of a weakly nonlinear solution to the fluid–structure model using thrust force measurements from an experiment with flexible plates subjected to the three different actuation types. The model is subsequently used in a self-propelled configuration – with a skin friction model that balances thrust to produce a constant cruising speed – to map the reactive versus resistive thrust production in a parameter space defined by the aspect ratio and the actuation frequency. We show that this balance is modified as the frequency of excitation changes and the response of the elastic plate shifts between different resonant modes, the pure heaving case being the most sensitive to the modal response with drastic changes in the reactive/resistive contribution ratio along the frequency axis. We analyse also the role of the phase lag between the heaving and pitching components in the case of combined actuation, showing in particular a non-trivial effect on the propulsive efficiency.
We study the force production dynamics of undulating elastic plates as a model for fish-like inertial swimmers. Using a beam model coupled with Lighthill’s large-amplitude elongated-body theory, we explore different localised actuations at one extremity of the plate (heaving, pitching and a combination of both) in order to quantify the reactive and resistive contributions to the thrust. The latter has the form of a quadratic drag in large Reynolds number swimmers and has recently been pointed out as a crucial element in the thrust force balance. We validate the output of a weakly nonlinear solution to the fluid–structure model using thrust force measurements from an experiment with flexible plates subjected to the three different actuation types. The model is subsequently used in a self-propelled configuration – with a skin friction model that balances thrust to produce a constant cruising speed – to map the reactive versus resistive thrust production in a parameter space defined by the aspect ratio and the actuation frequency. We show that this balance is modified as the frequency of excitation changes and the response of the elastic plate shifts between different resonant modes, the pure heaving case being the most sensitive to the modal response with drastic changes in the reactive/resistive contribution ratio along the frequency axis. We analyse also the role of the phase lag between the heaving and pitching components in the case of combined actuation, showing in particular a non-trivial effect on the propulsive efficiency.
M. Piñeirua, B. Thiria and R. Godoy-Diana;
J. Fluid Mech. 829: 731—750 (2017).
 Fish school structures are firstly based on social life or prey–predator interactions, but another idea has often been raised
Fish school structures are firstly based on social life or prey–predator interactions, but another idea has often been raised
by hydrodynamicists, claiming that fish could take advantage of schooling behavior from a locomotion efficiency perspective. By using a controlled swimming experiment with real schools, the present work shows that fish swimming together effectively need a less demanding stroke rate to sustain high swimming velocities, using, however, a different collective strategy compared with the usually suggested diamond pattern predicted by vortex-based interactions. The observed strategy, simply consisting of synchronized side-by-side swimming with nearest neighbors, finally, appears to be a lot more convenient for reaching an energy-saving regime.
I. Ashraf, H. Bradshaw, J. Halloy, T.-T. Ha, R. Godoy-Diana, B. Thiria; Proc. Natl. Acad. Sci. (PNAS), 114 (36), (2017)
 Wind energy is becoming a significant alternative solution for future energy production. Modern turbines now benefit from engineering expertise, and a large variety of different models exists, depending on the context and needs. However, classical wind turbines are designed to operate within a narrow zone centred around their optimal working point. This limitation prevents the use of sites with variable wind to harvest energy, involving significant energetic and economic losses. Here, we present a new type of bioinspired wind turbine using elastic blades, which passively deform through the air loading and centrifugal effects. This work is inspired from recent studies on insect flight and plant reconfiguration, which show the ability of elastic wings or leaves to adapt to the wind conditions and thereby to optimize performance. We show that in the context of energy production, the reconfiguration of the elastic blades significantly extends the range of operating regimes using only passive, non-consuming mechanisms. The versatility of the new turbine model leads to a large increase of the converted energy rate, up to 35%. The fluid/elasticity mechanisms involved for the reconfiguration capability of the new blades are analysed in detail, using experimental observations and modelling.
Wind energy is becoming a significant alternative solution for future energy production. Modern turbines now benefit from engineering expertise, and a large variety of different models exists, depending on the context and needs. However, classical wind turbines are designed to operate within a narrow zone centred around their optimal working point. This limitation prevents the use of sites with variable wind to harvest energy, involving significant energetic and economic losses. Here, we present a new type of bioinspired wind turbine using elastic blades, which passively deform through the air loading and centrifugal effects. This work is inspired from recent studies on insect flight and plant reconfiguration, which show the ability of elastic wings or leaves to adapt to the wind conditions and thereby to optimize performance. We show that in the context of energy production, the reconfiguration of the elastic blades significantly extends the range of operating regimes using only passive, non-consuming mechanisms. The versatility of the new turbine model leads to a large increase of the converted energy rate, up to 35%. The fluid/elasticity mechanisms involved for the reconfiguration capability of the new blades are analysed in detail, using experimental observations and modelling.
V. Cognet, S. Courrech du Pont, B. Thiria; Proc. Roy. Soc. A, 473, (2017)
 The purpose of this review article is to push amplitude equations as far as
The purpose of this review article is to push amplitude equations as far as
possible from threshold. We focus on the Stuart–Landau amplitude equation
describing the supercritical Hopf bifurcation of the flow in the wake of a
cylinder for critical Reynolds number Rc 46. After having reviewed
Stuartʼs weakly nonlinear multiple-scale expansion method, we first demon-
strate the crucial importance of the choice of the critical parameter for the wake behind a cylinder. Although Sipp and Lebedev (2007 J. Fluid Mech 593 333–58) correctly identified the adequate bifurcation parameter, they have plotted their results adding an additional linearization, which amounts to using e’ as approximation to e. We then illustrate the risks of calculating ‘running’ Landau constants by projection formulas at arbitrary values of the control parameter. For the cylinder wake case, this scheme breaks down and diverges close to Re 100. We propose an interpretation based on the progressive loss of the non-resonant compatibility condition, which is the cornerstone of Stuartʼs multiple-scale expansion method. We then briefly review a self-con- sistent model recently introduced in the literature and demonstrate a link between its properties and the above-mentioned failure.
F. Gallaire, E. Boujo, V. Mantic-Lugo, C. Arriatia, B. Thiria, P. Meliga ; Fluid Dyn. Res, 48, 061401, (2016)
 In this work, we address the case of red nose tetra fish Hemigrammus bleheri swimming in groups in a uniform flow, giving special attention to the basic interactions and cooperative swimming of a single pair of fish. We first bring evidence of synchronization of the two fish, where the swimming modes are dominated by ‘out-phase’ and ‘in-phase’ configurations. We show that the transition to this synchronization state is correlated with the swimming speed (i.e. the flow rate), and thus with the magnitude of the hydro- dynamic pressure generated by the fish body during each swimming cycle. From a careful spatio-temporal analysis corresponding to those synchronized modes, we characterize the distances between the two individuals in a pair in the basic schooling pattern. We test the conclusions of the analysis of fish pairs with a second set of experiments using groups of three fish. By identifying the typical spatial configurations, we explain how the nearest neighbour interactions constitute the building blocks of collective fish swimming.
In this work, we address the case of red nose tetra fish Hemigrammus bleheri swimming in groups in a uniform flow, giving special attention to the basic interactions and cooperative swimming of a single pair of fish. We first bring evidence of synchronization of the two fish, where the swimming modes are dominated by ‘out-phase’ and ‘in-phase’ configurations. We show that the transition to this synchronization state is correlated with the swimming speed (i.e. the flow rate), and thus with the magnitude of the hydro- dynamic pressure generated by the fish body during each swimming cycle. From a careful spatio-temporal analysis corresponding to those synchronized modes, we characterize the distances between the two individuals in a pair in the basic schooling pattern. We test the conclusions of the analysis of fish pairs with a second set of experiments using groups of three fish. By identifying the typical spatial configurations, we explain how the nearest neighbour interactions constitute the building blocks of collective fish swimming.
I. Ashraf, R. Godoy-Diana, J. Halloy, B. Collignon, B. Thiria ; Proc. R. Soc. Interface, 13, 20160734, (2016)
 Evolutionary trajectories are often biased by developmental and historical factors. However, environmental factors can also impose constraints on the evolutionary trajectories of organisms leading to convergence of morphology in similar ecological contexts. The physical properties of water impose strong constraints on aquatic feeding animals by generating pressure waves that can alert prey and potentially push them away from the mouth. These hydrodynamic constraints have resulted in the independent evolution of suction feeding in most groups of secondarily aquatic tetrapods. Despite the fact that snakes cannot use suction, they have invaded the aquatic milieu many times independently. Here, we test whether the aquatic environment has constrained head shape evolution in snakes and whether shape converges on that predicted by biomechanical models. To do so, we used three-dimensional geometric morphometrics and comparative, phylogenetically informed analyses on a large sample of aquatic snake species. Our results show that aquatic snakes partially conform to our predictions and have a narrower anterior part of the head and dorsally positioned eyes and nostrils. This morphology is observed, irrespective of the phylogenetic relationships among species, suggesting that the aquatic environment does indeed drive the evolution of head shape in snakes, thus biasing the evolutionary trajectory of this group of animals.
Evolutionary trajectories are often biased by developmental and historical factors. However, environmental factors can also impose constraints on the evolutionary trajectories of organisms leading to convergence of morphology in similar ecological contexts. The physical properties of water impose strong constraints on aquatic feeding animals by generating pressure waves that can alert prey and potentially push them away from the mouth. These hydrodynamic constraints have resulted in the independent evolution of suction feeding in most groups of secondarily aquatic tetrapods. Despite the fact that snakes cannot use suction, they have invaded the aquatic milieu many times independently. Here, we test whether the aquatic environment has constrained head shape evolution in snakes and whether shape converges on that predicted by biomechanical models. To do so, we used three-dimensional geometric morphometrics and comparative, phylogenetically informed analyses on a large sample of aquatic snake species. Our results show that aquatic snakes partially conform to our predictions and have a narrower anterior part of the head and dorsally positioned eyes and nostrils. This morphology is observed, irrespective of the phylogenetic relationships among species, suggesting that the aquatic environment does indeed drive the evolution of head shape in snakes, thus biasing the evolutionary trajectory of this group of animals.
M. Segall, R. Cornette, A.-C. Fabre, R. Godoy-Diana, A. Herrel ; Proc. R. Soc. B, 283, 20161645, (2016)
 Our last poster in collaboration with Francisco Huera-Huarte from Universitat Rovira i Virgili presented at the APS Gallery of Fluid Motion in the DFD 2015 Meeting.
Our last poster in collaboration with Francisco Huera-Huarte from Universitat Rovira i Virgili presented at the APS Gallery of Fluid Motion in the DFD 2015 Meeting.
Volumetric velocimetry of wake vortices produced by an undulatory swimmer
 In this Rapid Communication, we address a crucial point regarding the description of moderate to high Reynolds numbers aquatic swimmers. For decades, swimming animals have been classified in two different families of propulsive mechanisms based on the Reynolds number: the resistive swimmers, using local friction to produce the necessary thrust force for locomotion at low Reynolds number, and the reactive swimmers, lying in the high Reynolds range, and using added mass acceleration (described by perfect fluid theory). However, inertial swimmers are also systems that dissipate energy, due to their finite size, therefore involving strong resistive contributions, even for high Reynolds numbers. Using a complete model for the hydrodynamic forces, involving both reactive and resistive contributions, we revisit here the physical mechanisms responsible for the thrust production of such swimmers. We show, for instance, that the resistive part of the force balance is as crucial as added mass effects in the modeling of the thrust force, especially for elongated species. The conclusions brought by this work may have significant contributions to the understanding of complex swimming mechanisms, especially for the future design of artificial swimmers.
In this Rapid Communication, we address a crucial point regarding the description of moderate to high Reynolds numbers aquatic swimmers. For decades, swimming animals have been classified in two different families of propulsive mechanisms based on the Reynolds number: the resistive swimmers, using local friction to produce the necessary thrust force for locomotion at low Reynolds number, and the reactive swimmers, lying in the high Reynolds range, and using added mass acceleration (described by perfect fluid theory). However, inertial swimmers are also systems that dissipate energy, due to their finite size, therefore involving strong resistive contributions, even for high Reynolds numbers. Using a complete model for the hydrodynamic forces, involving both reactive and resistive contributions, we revisit here the physical mechanisms responsible for the thrust production of such swimmers. We show, for instance, that the resistive part of the force balance is as crucial as added mass effects in the modeling of the thrust force, especially for elongated species. The conclusions brought by this work may have significant contributions to the understanding of complex swimming mechanisms, especially for the future design of artificial swimmers.
M. Piñeirua, R. Godoy-Diana, and B. Thiria
PRE 91: 021001(R) (2015).
 We study experimentally a four-winged flapping flyer with chord-wise flexible wings in a self-propelled setup. For a given physical configuration of the flyer (i.e. fixed distance between the forewing and hindwing pairs and fixed wing flexibility), we explore the kinematic parameter space constituted by the flapping frequency and the forewing-hindwing phase lag.
We study experimentally a four-winged flapping flyer with chord-wise flexible wings in a self-propelled setup. For a given physical configuration of the flyer (i.e. fixed distance between the forewing and hindwing pairs and fixed wing flexibility), we explore the kinematic parameter space constituted by the flapping frequency and the forewing-hindwing phase lag.
Cruising speed and consumed elec- tric power measurements are performed for each point in the ( f, φ) parameter space and allow us to discuss the problem of performance and efficiency in four-winged flapping flight. We show that different phase-lags are needed for the system to be opti- mised for fastest flight or lowest energy consumption. A conjecture of the underlying mechanism is proposed in terms of the coupled dynamics of the forewing-hindwing phase lag and the deformation kinematics of the flexible wings.
 A circular cylinder oscillating in a viscous fluid produces an axisymmetric Stokes layer, a fundamental flow susceptible to centrifugal instabilities. In the present work we study such problem in the wake flow around a circular cylinder at Re = 100 performing rotary oscillations. For a forcing frequency ff and amplitude Ut, the non-dimensional control parameters f+ = ff /fn and A = Ut/U∞ are related to the flow properties, the inflow velocity U∞ and the natural vortex shedding frequency fn. In a previous work (D’Adamo et al., Phys. Rev. E. 84, 056308, 2011), we identified experimentally a zone in the parameter space with forcing at frequencies lower than the natural vortex shedding frequency, where the flow exhibited some turbulence features such as a continuous spectrum for the velocity components, and multiple vortex splitting interactions in the wake. We show here using numerical simulations that these observations result from a 3D centrifugal instability.
A circular cylinder oscillating in a viscous fluid produces an axisymmetric Stokes layer, a fundamental flow susceptible to centrifugal instabilities. In the present work we study such problem in the wake flow around a circular cylinder at Re = 100 performing rotary oscillations. For a forcing frequency ff and amplitude Ut, the non-dimensional control parameters f+ = ff /fn and A = Ut/U∞ are related to the flow properties, the inflow velocity U∞ and the natural vortex shedding frequency fn. In a previous work (D’Adamo et al., Phys. Rev. E. 84, 056308, 2011), we identified experimentally a zone in the parameter space with forcing at frequencies lower than the natural vortex shedding frequency, where the flow exhibited some turbulence features such as a continuous spectrum for the velocity components, and multiple vortex splitting interactions in the wake. We show here using numerical simulations that these observations result from a 3D centrifugal instability.
J. D’Adamo, R. Godoy-Diana & J. E. Wesfreid
Proceedings of the Royal Society A 471: 20150011 (2015).
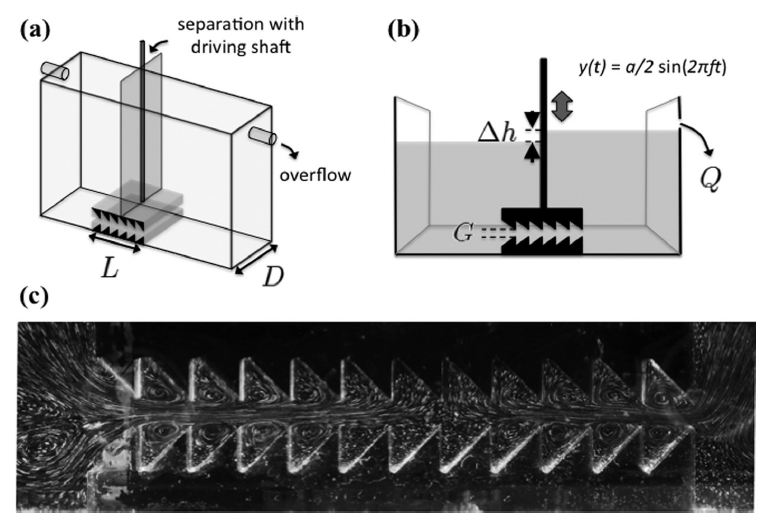
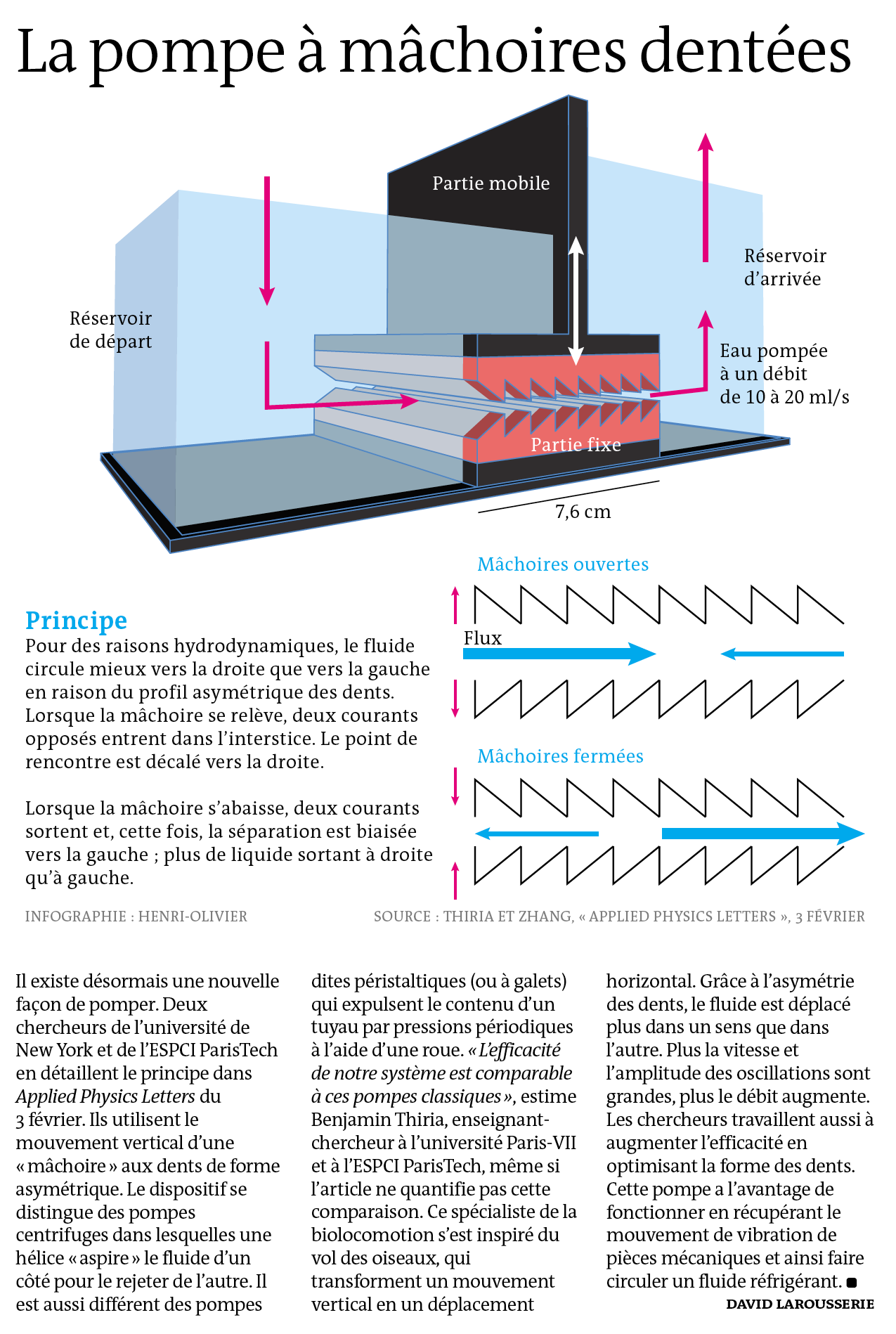
 We investigate a mechanism that effectively transports fluids using vibrational motion imposed onto fluid boundary with anisotropy. In our experiment, two asymmetric, sawtooth-like structures are placed facing each other and form a corrugated fluid channel. This channel is then forced to open and close periodically. Under reciprocal motion, fluid fills in the gap during the expansion phase of the channel and is then forced out during contraction. Since the fluid experiences different impedances when flowing in different directions, the stagnation point that separates flows of two directions changes within each driving period. As a result, fluid is transported unidirectionally.
We investigate a mechanism that effectively transports fluids using vibrational motion imposed onto fluid boundary with anisotropy. In our experiment, two asymmetric, sawtooth-like structures are placed facing each other and form a corrugated fluid channel. This channel is then forced to open and close periodically. Under reciprocal motion, fluid fills in the gap during the expansion phase of the channel and is then forced out during contraction. Since the fluid experiences different impedances when flowing in different directions, the stagnation point that separates flows of two directions changes within each driving period. As a result, fluid is transported unidirectionally.
 We study experimentally the propulsive dynamics of flexible undulating foils in a self-propelled swimming configuration near a wall. Measurements of swimming speed and propulsive force are performed, together with full recordings of the elastic wave kinematics and particle image velocimetry. We show that the presence of the wall can enhance the cruising velocity in some cases up to 15%. The physical mechanism responsible for this augmentation is first discussed qualitatively by studying the vorticity dynamics in the wake. A quantitative picture of the problem is then established using a POD analysis of the velocity fields in the wake, showing that the first POD mode is a good indicator of the kinetic energy in the propulsive jet.
We study experimentally the propulsive dynamics of flexible undulating foils in a self-propelled swimming configuration near a wall. Measurements of swimming speed and propulsive force are performed, together with full recordings of the elastic wave kinematics and particle image velocimetry. We show that the presence of the wall can enhance the cruising velocity in some cases up to 15%. The physical mechanism responsible for this augmentation is first discussed qualitatively by studying the vorticity dynamics in the wake. A quantitative picture of the problem is then established using a POD analysis of the velocity fields in the wake, showing that the first POD mode is a good indicator of the kinetic energy in the propulsive jet.
 During cruising, the thrust produced by a self-propelled swimmer is balanced by a global drag force. For a given object shape, this drag can involve skin friction or form drag, both being well-documented mechanisms. However, for swimmers whose shape is changing in time, the question of drag is not yet clearly established. We address this problem by investigating experimentally the swimming dynamics of undulating thin flexible foils. Measurements of the propulsive performance together with full recording of the elastic wave kinematics are used to discuss the general problem of drag in undulatory swimming. We show that a major part of the total drag comes from the trailing longitudinal vortices that roll-up on the lateral edges of the foils. This result gives a comparative advantage to swimming foils of larger span thus bringing new insight to the role of aspect ratio for undulatory swimmers.
During cruising, the thrust produced by a self-propelled swimmer is balanced by a global drag force. For a given object shape, this drag can involve skin friction or form drag, both being well-documented mechanisms. However, for swimmers whose shape is changing in time, the question of drag is not yet clearly established. We address this problem by investigating experimentally the swimming dynamics of undulating thin flexible foils. Measurements of the propulsive performance together with full recording of the elastic wave kinematics are used to discuss the general problem of drag in undulatory swimming. We show that a major part of the total drag comes from the trailing longitudinal vortices that roll-up on the lateral edges of the foils. This result gives a comparative advantage to swimming foils of larger span thus bringing new insight to the role of aspect ratio for undulatory swimmers.
 Confined geometries usually involve reflected waves interacting together to form a spatially stationary pattern. Our recent study on the locomotion of a self-propelled elastic swimmer on a free surface [Ramananarivo et al. 2013], however, has shown that propagating wave kinematics can naturally emerge in a forced elastic rod, even with boundary conditions involving significant reflections. This particular behavior is observed only in the presence of strong damping. Based on those observations, this study aims at giving a quantitative description of the mechanism involved to prevent the built up of standing waves and generate traveling solutions. The question is discussed here in the framework of hand-made artificial swimmers as an example of practical application but we believe that its potential is beyond this scope.
Confined geometries usually involve reflected waves interacting together to form a spatially stationary pattern. Our recent study on the locomotion of a self-propelled elastic swimmer on a free surface [Ramananarivo et al. 2013], however, has shown that propagating wave kinematics can naturally emerge in a forced elastic rod, even with boundary conditions involving significant reflections. This particular behavior is observed only in the presence of strong damping. Based on those observations, this study aims at giving a quantitative description of the mechanism involved to prevent the built up of standing waves and generate traveling solutions. The question is discussed here in the framework of hand-made artificial swimmers as an example of practical application but we believe that its potential is beyond this scope.
 Many living organisms use body undulations to propulse themselves through fluids: they achieve net forward motion by propagating wave of curvature down their deformable body. In inertial regimes, the anguilliform swimming mechanism has first been addressed in pioneer study by Lighthill [J. Fluid Mech., vol 9, 305-317, 1960]. In his so called reactive model, Lighthill considered the inertial momentum redistribution caused by the undulations within the fluid and he showed that the thrust force generated through this process could be estimated from the kinematic of the tail of the swimmer alone. A vast amount of theoretical and numerical works has followed, providing the basis for a broad spectrum of applications, especially in robotic and engineering.
Many living organisms use body undulations to propulse themselves through fluids: they achieve net forward motion by propagating wave of curvature down their deformable body. In inertial regimes, the anguilliform swimming mechanism has first been addressed in pioneer study by Lighthill [J. Fluid Mech., vol 9, 305-317, 1960]. In his so called reactive model, Lighthill considered the inertial momentum redistribution caused by the undulations within the fluid and he showed that the thrust force generated through this process could be estimated from the kinematic of the tail of the swimmer alone. A vast amount of theoretical and numerical works has followed, providing the basis for a broad spectrum of applications, especially in robotic and engineering.
We present here a swimmer able to propulse itself at the surface of a water tank. The set up consists in a flexible filament forced to oscillate by imposing an harmonic motion to one of its extremities (using magnetic interactions). We fully characterize its dynamics, with the objective to bring a better understanding of fluid-solid interactions in undulatory propulsion. The characteristics of the propagating wave are crucial in determining the swimming performance. Modeling the filament as a forced beam under fluid loading, we pinpoint the different elements that can account for the observed kinematic. In particular, we show that in our Reynolds number regime, a quadratic fluid dissipation term is needed to propagate passively a wave in a finite elastic beam. The order of magnitude of this term is estimated by comparing the theoretical predictions of the model against the experimental data. When injecting the prescribed body deformations into Lighthill’s model, we show that this reactive theory gives good predictions of the performance of the swimmer (its forward speed).
31st Annual Gallery of Fluid Motion (Pittsburgh, Pennsylvania, USA, 2013)

Up to now, the take-off stage remains an elusive phase of insect flight relatively poorly explored compared to other maneuvers. An overall assessment of the different mechanisms involved in the force production during take-off has never been explored. Focusing on the first downstroke, we have addressed this problem from a force balance perspective in butterflies taking-off from the ground. In order to determine if the sole aerodynamic wing force could explain the observed motion of the insect, we have firstly compared a simple analytical model of the wings force to the acceleration of the insect’s center of mass estimated from video tracking of the wing and body motions. Secondly, the wing kinematics has also been used for numerical simulations of the aerodynamic flow field. Similar wing aerodynamic forces were obtained by the two methods. Both are however not sufficient, nor is the inclusion of the ground effect, to predict faithfully the body acceleration. We have to resort to the legs forces to obtain a fitting model. We show that the median and hind legs display an active extension responsible for the initiation of the upward motion of the insect’s body, occurring before the onset of the wing downstroke. We estimate that legs generate, at various times, an upward force which can be much larger than all other forces applied to the insect’s body. The relative timing of leg and wing forces explain the large variability of trajectories observed during the maneuvers.

It is known that the wake pattern observed in a cross-section behind swimming or flying animals is typically characterized by the presence of periodical vortex shed- ding. However, depending on species, propulsive wakes can differ according to their spatial ordering: symmetric (squid-like) or asymmetric (fish-like), with respect to the motion axis. We conducted a very precise experiment to analyse the role of the wake topology in the generation of propulsion. Self-propulsion is achieved by the flapping motion of two identical pitching rigid foils, separated by a distance d. By keeping the momentum input unchanged, we compared both symmetric and asymmetric flapping modes. For the entire explored range of parameters, the symmetric squid-like mode proves to be more efficient for thrust generation than the fish-like asymmetrical one. We show here that this difference is due to a pressure effect related to the ability of each wake to produce, or not, significant mixing in the near wake region.
 Saving energy and enhancing performance are secular preoccupations shared by both nature and human beings. In animal locomotion, flapping flyers or swimmers rely on the flexibility of their wings or body to passively increase their efficiency using an appropriate cycle of storing and releasing elastic energy. Despite the convergence of many observations pointing out this feature, the underlying mechanisms explaining how the elastic nature of the wings is related to propulsive efficiency remain unclear. Here we use an experiment with a self-propelled simplified insect model allowing to show how wing compliance governs the performance of flapping flyers. Reducing the description of the flapping wing to a forced oscillator model, we pinpoint different nonlinear effects that can account for the observed behavior ---in particular a set of cubic nonlinearities coming from the clamped-free beam equation used to model the wing and a quadratic damping term representing the fluid drag associated to the fast flapping motion. In contrast to what has been repeatedly suggested in the literature, we show that flapping flyers optimize their performance not by especially looking for resonance to achieve larger flapping amplitudes with less effort, but by tuning the temporal evolution of the wing shape (i.e., the phase dynamics in the oscillator model) to optimize the aerodynamics.
Saving energy and enhancing performance are secular preoccupations shared by both nature and human beings. In animal locomotion, flapping flyers or swimmers rely on the flexibility of their wings or body to passively increase their efficiency using an appropriate cycle of storing and releasing elastic energy. Despite the convergence of many observations pointing out this feature, the underlying mechanisms explaining how the elastic nature of the wings is related to propulsive efficiency remain unclear. Here we use an experiment with a self-propelled simplified insect model allowing to show how wing compliance governs the performance of flapping flyers. Reducing the description of the flapping wing to a forced oscillator model, we pinpoint different nonlinear effects that can account for the observed behavior ---in particular a set of cubic nonlinearities coming from the clamped-free beam equation used to model the wing and a quadratic damping term representing the fluid drag associated to the fast flapping motion. In contrast to what has been repeatedly suggested in the literature, we show that flapping flyers optimize their performance not by especially looking for resonance to achieve larger flapping amplitudes with less effort, but by tuning the temporal evolution of the wing shape (i.e., the phase dynamics in the oscillator model) to optimize the aerodynamics.
 The vortex streets produced by a flapping foil of span-to-chord aspect ratio of 4:1 are studied in a hydrodynamic tunnel experiment. In particular, the mechanisms giving rise to the symmetry breaking of the reverse Bénard-von Kármán vortex street that characterizes fish-like swimming and forward flapping flight are examined. Two-dimensional particle image velocimetry measurements in the mid-plane perpendicular to the span axis of the foil are used to characterize the different flow regimes. The deflection angle of the mean jet flow with respect to the horizontal observed in the average velocity field is used as a measure of the asymmetry of the vortex street. Time series of the vorticity field are used to calculate the advection velocity of the vortices with respect to the free stream, defined as the phase velocity, as well as the circulation of each vortex and the spacing between consecutive vortices in the near wake. The observation that the symmetry breaking results from the formation of a dipolar structure from each couple of counter-rotating vortices shed on each flapping period serves as starting point to build a model for the symmetry breaking threshold. A symmetry breaking criterion based on the relation between the phase velocity of the vortex street and an idealized self-advection velocity of two consecutive counter-rotating vortices in the near wake is established. The predicted threshold for symmetry breaking accounts well for the deflected wake regimes observed in the present experiments and may be useful to explain other experimental and numerical observations of similar deflected propulsive vortex streets reported in the literature.
The vortex streets produced by a flapping foil of span-to-chord aspect ratio of 4:1 are studied in a hydrodynamic tunnel experiment. In particular, the mechanisms giving rise to the symmetry breaking of the reverse Bénard-von Kármán vortex street that characterizes fish-like swimming and forward flapping flight are examined. Two-dimensional particle image velocimetry measurements in the mid-plane perpendicular to the span axis of the foil are used to characterize the different flow regimes. The deflection angle of the mean jet flow with respect to the horizontal observed in the average velocity field is used as a measure of the asymmetry of the vortex street. Time series of the vorticity field are used to calculate the advection velocity of the vortices with respect to the free stream, defined as the phase velocity, as well as the circulation of each vortex and the spacing between consecutive vortices in the near wake. The observation that the symmetry breaking results from the formation of a dipolar structure from each couple of counter-rotating vortices shed on each flapping period serves as starting point to build a model for the symmetry breaking threshold. A symmetry breaking criterion based on the relation between the phase velocity of the vortex street and an idealized self-advection velocity of two consecutive counter-rotating vortices in the near wake is established. The predicted threshold for symmetry breaking accounts well for the deflected wake regimes observed in the present experiments and may be useful to explain other experimental and numerical observations of similar deflected propulsive vortex streets reported in the literature.
Dissertations
Baptiste Lafoux (2023) Collective fish swimming dynamics in altered flows, PhD thesis 2020-2023, defended on December 13, 2023
Vincent Stin (2023) Mesure de l’hydrodynamique de la nage des serpents, PhD thesis 2020-2023, defended on December 1, 2023
Gatien Polly (2023) Interacions vague-structure d’une plaque flexible immergée pour la conversion d’énergie des vagues, PhD thesis 2020-2023, defended on November 9, 2023
HDR
B. Thiria: Sillages et interactions fluide/structure: Contrôle, biomimetisme et conversion d’énergie. Habilitation à diriger des recherches, Université Paris Diderot, 2014. (Soutenue le 4/12/2014)
Alumni
Past PhD students and postdocs:
 Elizabeth Gregorio, Postdoc 2023-2025 Snake swimming hydrodynamics | |
 Camille Aracheloff, PhD 2021-2024 Adaptation and biophysics of flight for dragonflies |
 Gauthier Bertrand, PhD 2021-2024 Sailing-inspired unsteady propulsion |
 Vincent Stin, PhD 2020-2023 Snake swimming hydrodynamics, Postdoc 2024: Measuring the velocity field around a vibrating wing nanodrone |
 Baptiste Lafoux, PhD 2020-2023 Collective fish swimming dynamics in altered environments |
 Alexis Mérigaud, Postdoc 2020-2023 Ocean wave energy converters (funding: Marie Skłodowska-Curie fellowship) |
 Gatien Polly, PhD 2020-2023 Interaction between surface waves and elastic structures |
 Tristan Auregan (PhD 2020-2023) Tristan Auregan (PhD 2020-2023)Bio-inspired propellers with passively-tunable blades |
 Jishen Zhang (Postdoc 2022-2023) Jishen Zhang (Postdoc 2022-2023)Optimization of unsteady propulsion and aerodynamic drag for Olympic sailing (funding: ANR Du carbone à l’or olympique) |
- Camille Aracheloff, PhD 2021-2024
- Gauthier Bertrand, PhD 2021-2024
- Vincent Stin, PhD 2020-2023
- Baptiste Lafoux, PhD 2020-2023
- Alexis Mérigaud, Postdoc 2020-2023
- Gatien Polly (PhD 2020-2023)
- Tristan Aurégan (PhD 2020-2023)
- Jishen Zhang (Postdoc 2022-2023)
- Roméo Antier (PhD 2018-2021)
- Bill François (PhD 2017-2021)
- Clotilde Nové-Josserand (PhD 2015-2018)
- Intesaaf Ashraf (PhD 2014-2017)
- Marion Segall (PhD student 2014-2017)
- Vincent Cognet (PhD student 2014-2017, Postdoc 2018)
- Miguel Piñeirua (Postdoc 2014-2015)
- Sophie Ramananarivo (MSc Internhsip 2010, PhD student 2010-2013)
- Verónica Raspa (Postdoc 2010-2013)
- Catherine Marais (MSc internhsip 2007, PhD student 2007-2010)
Short term internship students
- Sam Gaborieau, M2 ICFP, 2025
- Audrey Nathan, M1 Énergétique et Environnement, Sorbonne Université, 2025
- Dorottya Petrov, M1 Material science and engineering, École Centrale de Lyon, 2025
- Mame Diarra Dieng, BUT Mésures Physiques, IUT de Saint Denis, 2025
- Victor Dupic-Miquel, Parcours Recherche Centrale Supelec, 2023-2025
- Xiangyuan Mi (米湘媛), Visiting PhD student, Institute of Hydrobiology, Chinese Academy of Sciences, 2024-2025
- Alexandre Dallot, M2 intern, ENS Paris Saclay, 2024
- Marie Charles-Bray, M1 intern, École Centrale de Lyon, 2024
- Eloi Colliau, CPES Parcours Sciences, PSL Université, 2024
- Ianis Huin-Sesnis (M1 internship ENS, 2023)
- Diane Komaroff (M2 internship Université Paris Saclay, 2023)
- Paul Bernard (M2 internship ENS, 2023)
- Mathilde Lemoine (ENSTA 2A internship, 2022)
- Mateus Gadotti Milagre (ENSTA 2A internship, 2022)
- Carlos García Baena (Visiting PhD Student, Universidad de Jaén, 2021)
- Jeanne Moscatelli (M1 internship, 2021)
- Paul Bienvenu (ESPCI 3A internship, 2021)
- Cindy Da Costa (L3 internship, 2021)
- Lucie Gallardo (L1 internship, 2021)
- Mathieu Melennec (École Polytechnique, L3 internship 2021)
- Léo Walter (Internship ISAE-ENSMA 3A 2020-2021)
- Rind Alhage (Ecole Polytechnique, 3A 2020)
- Lila Séguy (ESPCI 3A 2020)
- Mateus Costa Guia (Ecole Polytechnique 3A 2019)
- Alicia Giménez (SU, M1 internship 2019 and BSc Physics, UAB 2019-2020)
- Delphine Fourteau (U Paris Sud, L2 internship 2019)
- Baptiste Lafoux (M2 Fluid Mechanics, Sorbonne U/Ecole Polytechnique, 2019)
- Baptiste Vauleoun (PSL CPES, 2019)
- Nicolas Cattaud (Université Cergy-Pontoise L3, 2018)
- Alexandre Zanoni (Université Paris Diderot L3, 2018)
- Sarah Fourcassier (PSL CPES, 2018)
- Bill François (ENS 4th year internship, 2017)
- Matthieu Baron (ENS Cachan L3, 2017)
- Baptiste Ferrero (ESPCI Internship, 2017)
- Martyna Góral (M2 Fluid Mechanics, UPMC/Ecole Polytechnique, 2017)
- Luce-Marie Petit (M2 Biomechanical engineering, Université Paris-Saclay, 2017)
- Hanaé Bradshaw (L3, FdV, CRI 2016)
- Pedro Miguel Fernandes (ENSTA 2A, 2016)
- Florian Benoit (ESPCI 3A, 2016)
- Tùng Hà Thanh (ESPCI 3A, 2016)
- Clément Haeck (ENS Cachan L3, 2016)
- Thierry Ksstentini (UPMC L3, 2016)
- Gabriel Victorino Cardoso (Ecole Polytechnique 3A, 2016)
- Jérôme Hardoüin (MSc intern, Exole Polytechnique 2015)
- Keziah Reynoso (MSc intern 2014-2015)
- Lucien Causse (ENS Cachan Internship 2014 and 2015)
- Arnaud Choux (ENS Cachan Internship 2014)
- Olivier Spitz (ESPCI Internship 2014)
- Jérôme Vacher (ESPCI Internship 2014)
- Prasann Jain (IIT Kharagpur, India, Internship 2013)
- Karanvir Singh (IIT Kanpur, India, Internship 2013)
- Antoine Gaillard (ENS Internship 2013)
- Mariana Centeno (UNAM, Mexico, MSc Internship 2012)
- Maxime Dana (ENSTA Internship 2012)
- Cécile Gaubert (MSc Internship 2011)
- Alexis Weinreb (ESPCI Internship 2011)
- Olivia Gann (ESPCI Internship 2011)
Visitors and collaborators
Visitors
- Daegyoum Kim (KAIST, 2025)
- Manuel Lorite Díez (Universidad de Granada, 2025)
- Juan D’Adamo (LFD, FIUBA, 2018, 2021, 2025)
- Valentina Di Santo (Stockholm University, 2021)
- Yahya Modarres-Sadeghi (UMass Amherst, 2019)
- Dmitry Kolomensky (JAMSTEC, 2018)
- Alexander Alexeev (Georgia Tech, 2018)
- Gen Li (JAMSTEC, 2017, 2025)
- Federico Castro-Hebrero (LFD, FIUBA PhD student, 2016)
- Francisco Huera-Huarte (URV, Tarragona, 2015)
- Rafael Fernández Prast (PhD visiting student, 2013)
- Geoffrey Spedding (USC, 2013)
- Roberto Zenit (UNAM, 2013)
Past and present collaborators
- Juan D’Adamo (LFD-FI, UBA, Bunos Aires)
- Jean-Luc Aider (PMMH, ESPCI Paris)
- Xavier Bonnet (CEBC, Chizé)
- Jérôme Casas (IRBI, Université de Tours)
- Sylvain Courrech du Pont (MSC, Paris)
- Vincent Debat (MNHN, Paris)
- Valentina Di Santo (Stockholm University)
- Marc Fermigier (PMMH, ESPCI Paris)
- Romain Garrouste (MNHN, Paris)
- Sébastien Grondel (IEMN, Valenciennes)
- Anthony Herrel (MNHN, Paris)
- Dmitry Kolomensky (Skoltech, Moscow)
- Frédéric Lechenault (LPENS, Paris)
- Gen Li (JAMSTEC, Yokohama)
- Violaine Llaurens (MNHN, Paris)
- André Nel (MNHN, Paris)
- Miguel Piñeirua (IRBI, Université de Tours)
- Daniel Pradal (PMMH, ESPCI Paris)
- Veronica Raspa (DF-FCEyN, UBA, Buenos Aires)
- Benoît Semin (PMMH, ESPCI Paris)
- Olivier Thomas (ENSAM, Lille)
- José Eduardo Wesfreid (PMMH, ESPCI Paris)
Funding
In addition to the research resources provided by the PMMH lab’s parent institutions (ESPCI Paris–PSL, CNRS, Sorbonne Université and Univ Paris Cité), our research has been funded by the following:
- French National Research Agency (ANR):
DRAGON2: Snake swimming, 2020-2024
ANR 2020
PI : X. Bonnet (CEBC)
NANOFLY: Nanodrone basé sur le contrôle d’ailes vibrantes, 2020-2023
ANR ASTRID 2019
PI : S. Grondel (IEMN)
Entomopter: The physics of insect-inspired flapping wings, 2008-2012
Project ANR-08-BLAN-0099
PI: R. Godoy-Diana
- CNRS:
Projet MODULO : Modélisation des structures tourbillonnaires propulsives de la nage par ondulations, 2019-2020
Mission pour les Initiatives Transverses et Interdisciplinaires (MITI), Défi “Modélisation du vivant”.
PI : X. Bonnet, (CEBC)
Bio-inspired wave-energy absorbers, 2018
INSIS, PEPS et Réseaux "Ingénierie verte"
PI : R. Godoy-Diana
- European Commission
Marie Skłodowska-Curie Actions, InWAS-IF, 2020-2023
ER: Alexis Mérigaud, Supervision: R. Godoy-Diana & B. Thiria
European Union’s Horizon 2020 research and innovation programme
Marie Skłodowska-Curie grant agreement No 842967
- Other sources
Fluids and elasticity for biomimetic propulsion, 2012-2014
EADS foundation (now Fondation AIRBUS)
PI: R. Godoy-Diana & B. Thiria
Bio-inspired locomotion, 2010-2011
Research in Paris, Ville de Paris
Postdoctoral grant for V. Raspa
Supervision: R. Godoy-Diana & B. Thiria
Once were news...
Marion’s paper on the hydrodynamics of frontal striking in aquatic snakes is now published in Bioinspiration and Biomimetics 14 036005 (2019).
Check out our review papers in the December 2018 issue of Current Opinion in Insect Science, on the special section on Insect bio-inspired micro and nanotechnologies edited by Jérôme Casas.
Juan’s paper on forced wake just published in Phys. Rev. Fluids
Clotilde’s work on bio-inspired harvesters is now published in Bioinspiration and Biomimetics.
Our review on the role drag in animal locomotion has been published in Interface
Check out the last news on our PNAS paper in Hakai Magazine
Read new Miguel’s JFM and Intesaaf’s PNAS on fish swimming.
Check out Vincent’s work on bio-inspired wind turbines published in Proceedings of the Royal Society A and covered by Science.
Check out our mini-film (in French), part of the Nature=Futur series produced by "La Belle Société" on flapping wings and bio-inspired urban windmills.
![]()